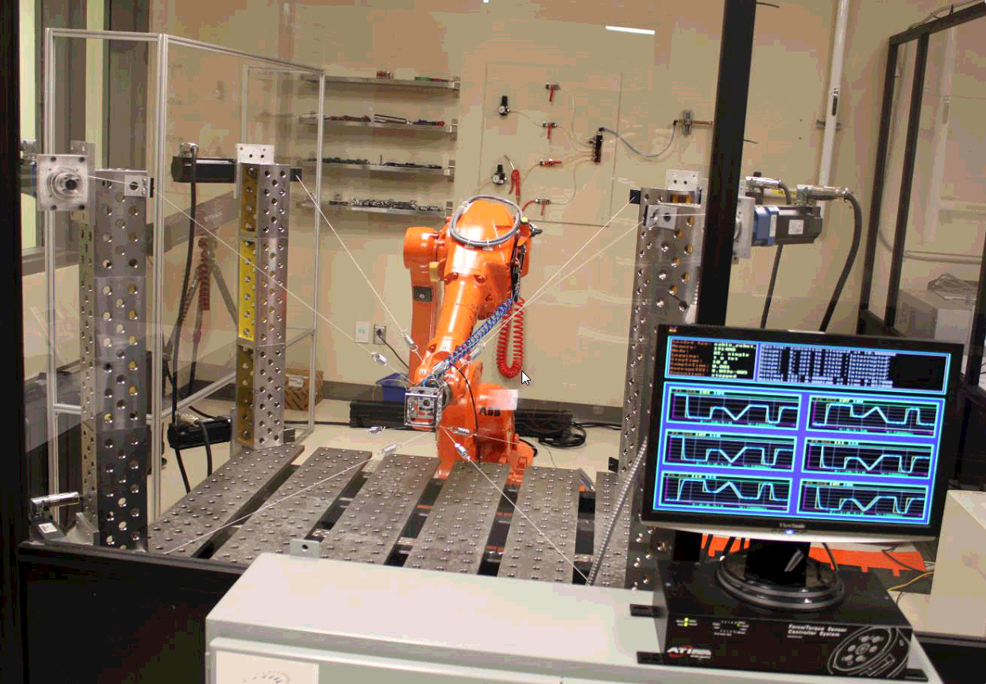

Cable-Driven Omnidirectional Loading Simulator (CabOLS)
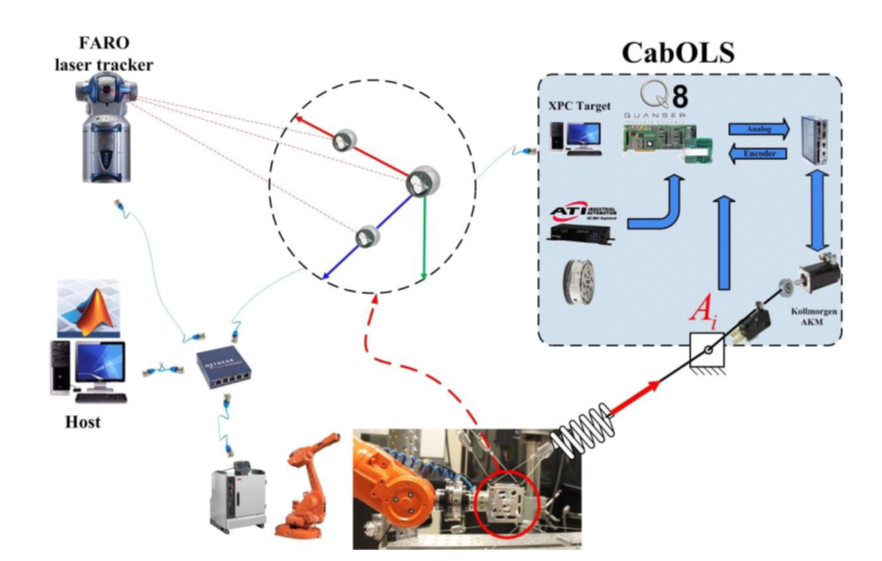
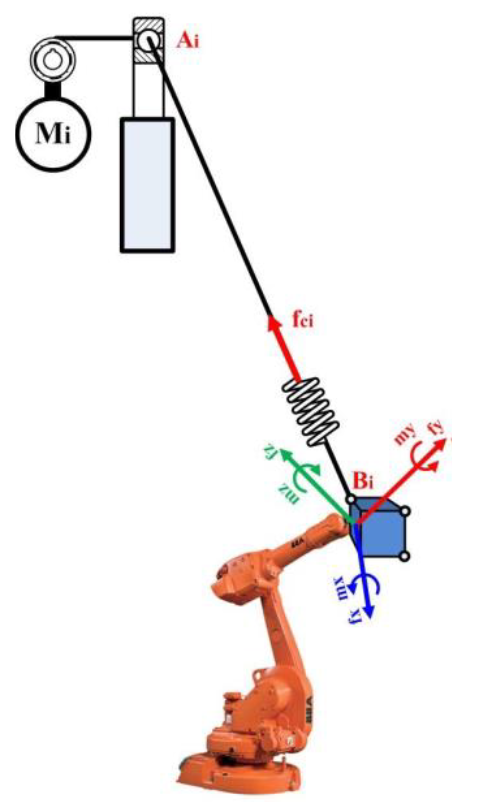
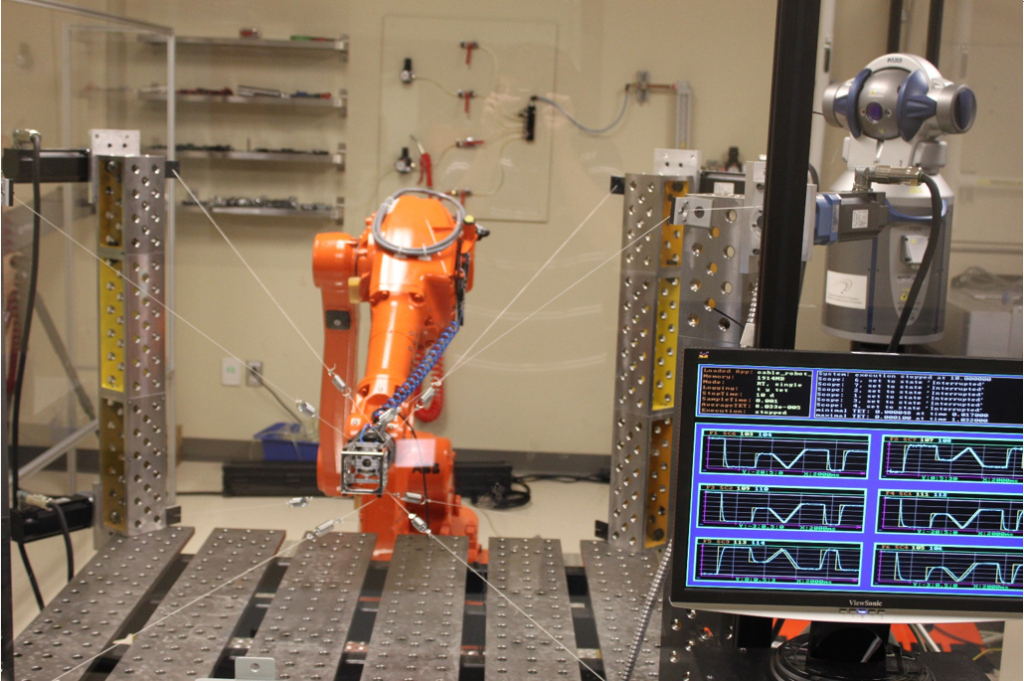
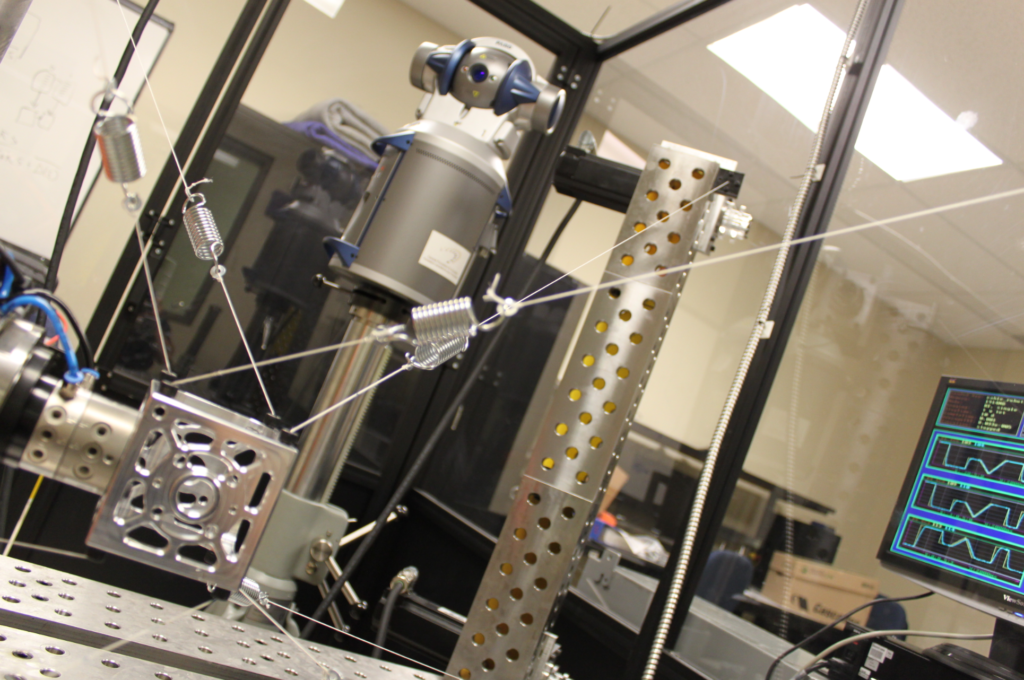
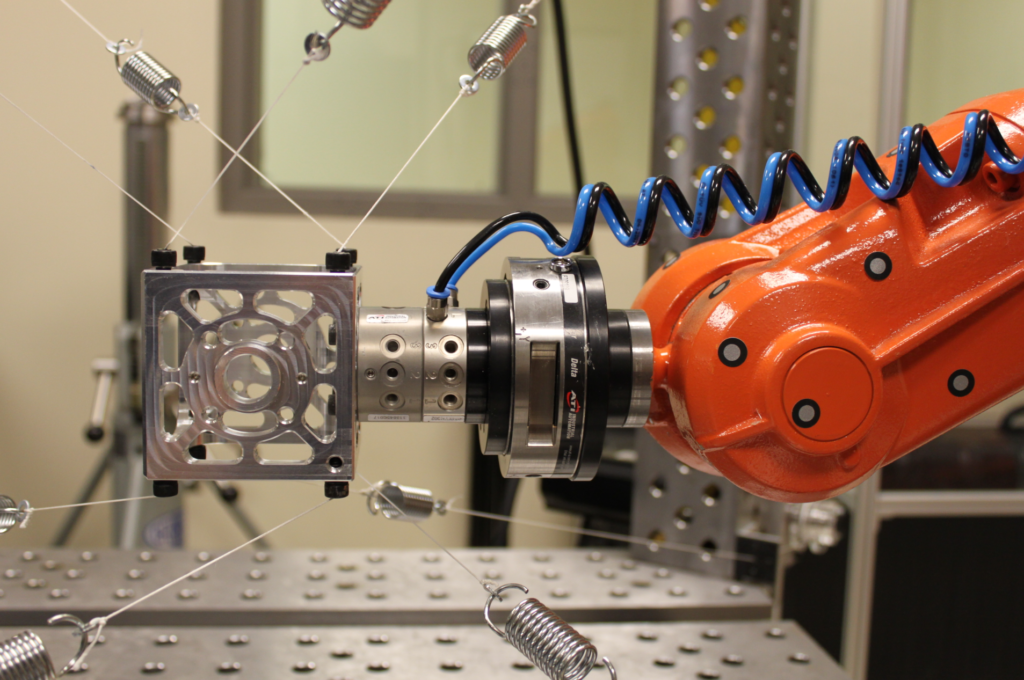
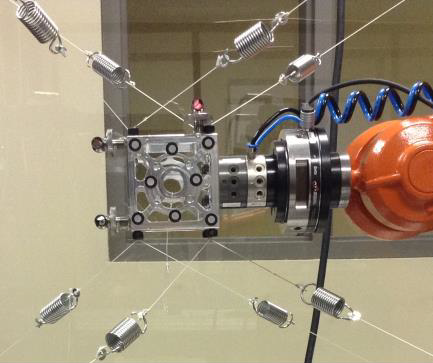
CabOLS is designed and built to accurately control a 6-DOF wrench on a fixed or slow moving target. The CabOLS offers several important advantages: simplicity and efficiency of the mechanical structure and controller, precision in load simulation as well as the cost efficiency. The mechanical design of CabOLS is innovative in that it employs an accurate linear spring in each cable to estimate the tension in the cable instead of using a force sensor which adds complexity to the design. The spring also compensates for the nonlinear effect of backlash of the gearbox and thereby makes a simple control topology feasible.
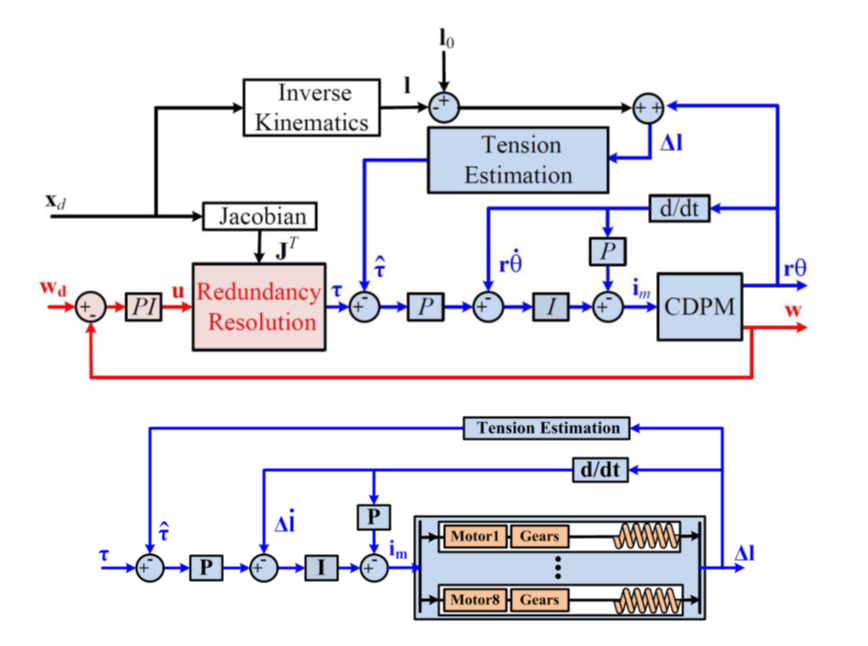
The structure of the controller is managed to be as simple as possible without losing efficiency. In order to achieve accurate force control on the target object two levels of control in Cartesian and joint spaces were considered. Moreover optimal projection of the tension in the cables i.e. real-time redundancy resolution is implemented in the CabOLS controller.
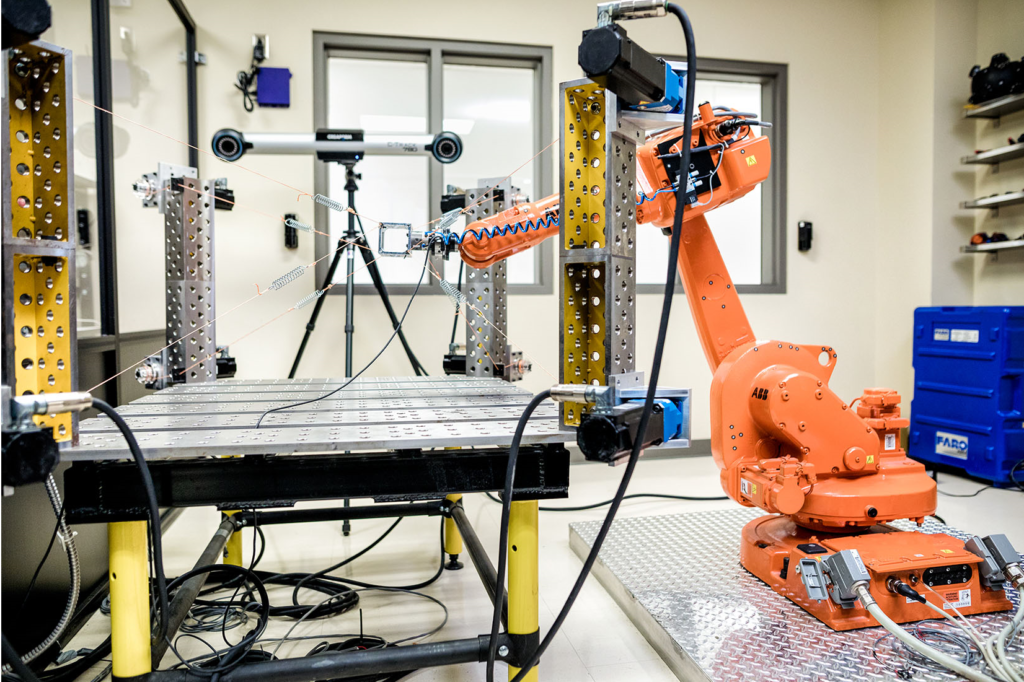
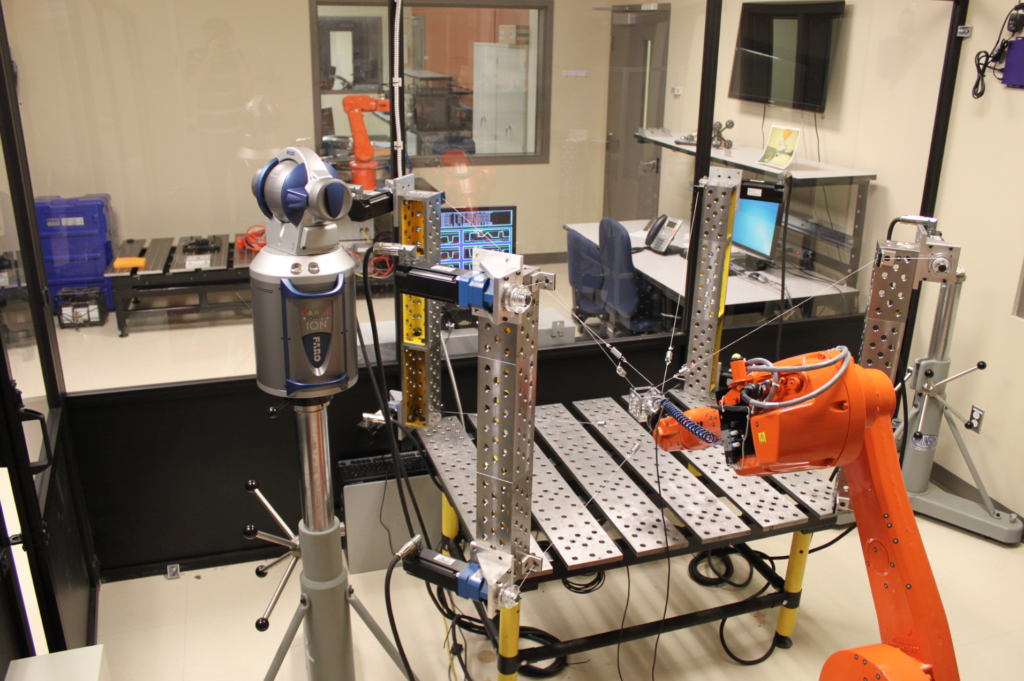
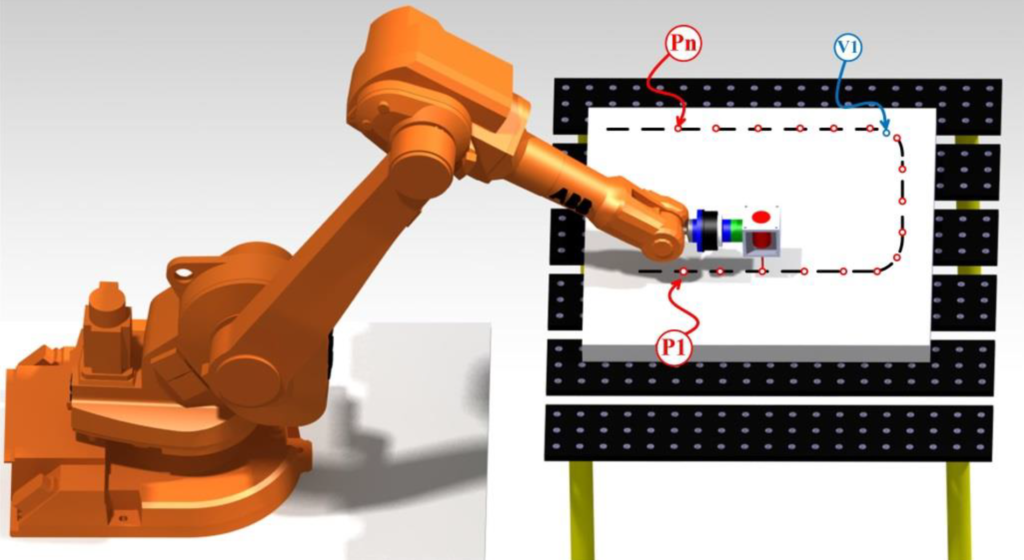
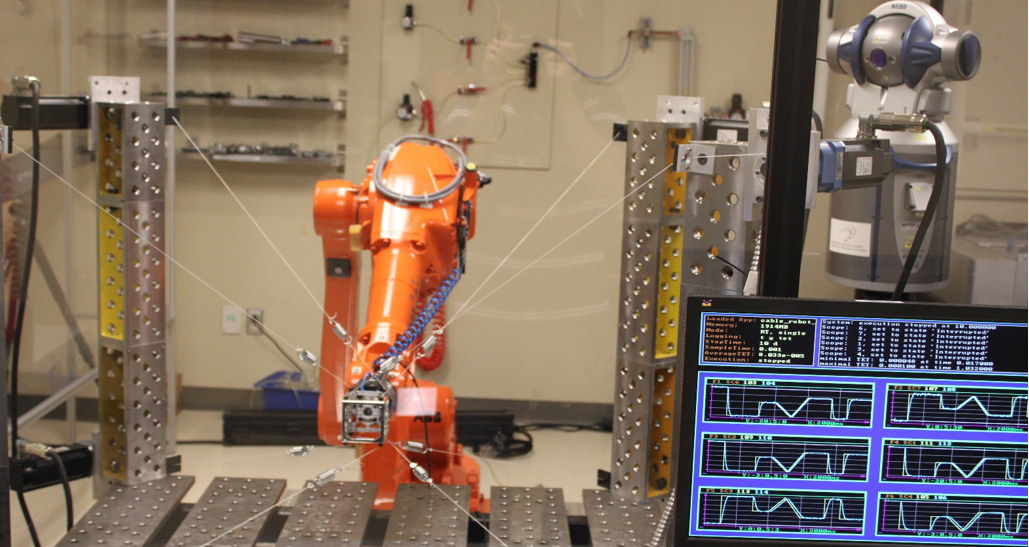
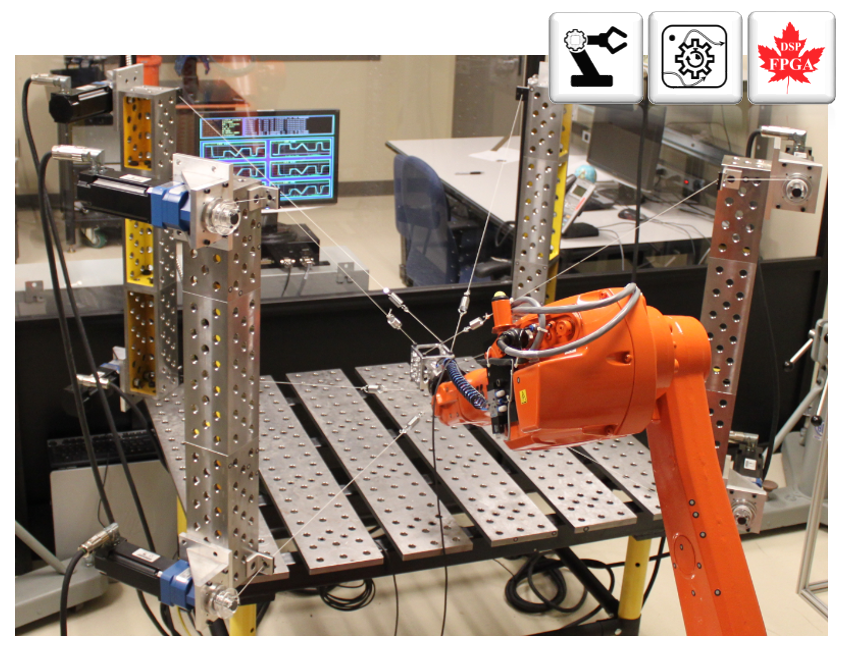
In the present project CabOLS is used for stiffness analysis of industrial robots. In an automated process the CabOLS is controlled to exert the desired wrench vector on an ABB robot and a laser tracker is employed to measure the related deflection. Simultaneously, the stiffness of joints is identified automatically by means of the incoming data.